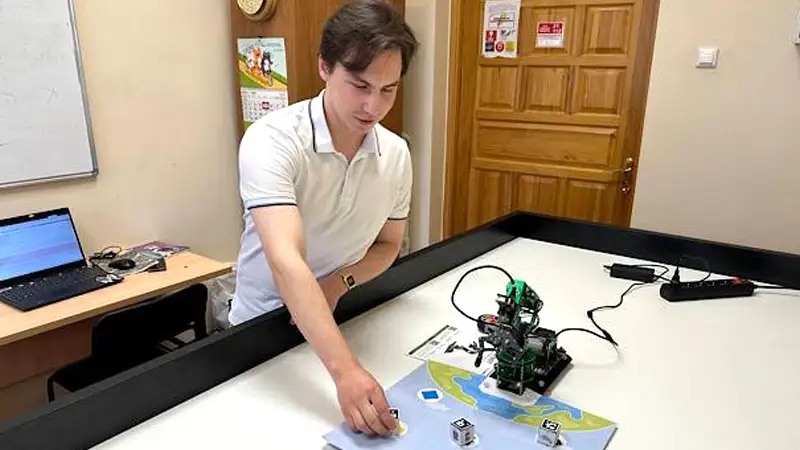
Робот использует инновационные ArUco-маркеры — бинарные квадратные маркеры с уникальным ID, которые легко распознаются камерой под различными углами, в отличие от обычных штрихкодов. Система работает следующим образом: робот считывает маркер, определяет положение объекта и переставляет его в заданную точку. В ходе тестирования робот успешно рассортировал четыре цветных кубика с маркерами.
Я применил метод решения задачи в условиях, применимых в практических целях, при которых не нужно вводить дополнительные параметры, что заметно упрощает вычисления и увеличивает скорость работы манипулятора благодаря маркерам,
отметил Глеб Богданов
Свой проект студент продолжит развивать в области решения задач обратной кинематики: повышение точности и скорости движения, поиск оптимального решения по нагрузке на робота и повышение качества распознавания кодов.